最近よく耳する、ベクタリングコントロールとはいったいどんな機能なのか、ご紹介したいと思います。
目次
ベクタリングコントロールとは?
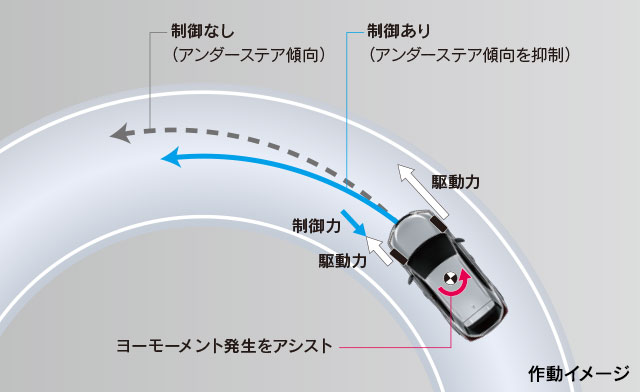
コーナリング時などに駆動力を制御し、車両挙動を安定させ、アンダーステアやオーバーステアを抑制するシステムのことをいいます。

その車両の挙動を安定させる方法にも違いがあり、主に2種類に分けられます。
駆動によるベクタリング
駆動によるベクタリングは、コーナーに差し掛かるとき(ターンイン時)に外輪に大きく駆動をかけ、オーバーステアを抑制するものです。
4輪を駆動してベクタリングを行うことから、4輪駆動車であることが前提であり、システムが複雑なため高価格車にのみ設定されることが多いです。
SH-AWD

ホンダのレジェンド、NSXに採用されるSH-AWDは、4輪それぞれが駆動することにより、オン・ザ・レール感覚を実現しています。
旋回時、曲がろうとする方向の外側の後輪に力を多くかけ、クルマ自身に旋回力を起こさせることで旋回性能の向上に寄与。思い描いた進路に極めて忠実に、高い安定感と一体感を持って曲がれるオン・ザ・レール感覚を実現。
ホンダレジェンド公式HPより

ダイナミックトルクベクタリングコントロール

トヨタのRAV4に搭載される、ダイナミックトルクベクタリングコントロール。後輪の左右を独立させて制御するので安定した挙動を実現します。

RAV4は本格派SUVであることから、このダイナミックトルクベクタリングコントロールは、コーナーをきれいに曲がることに主眼を置いているわけではないかもしれませんが、大型SUVらしからぬ、すっきりとしたハンドリングを実現していました。
ちなみにRAV4には、後述する制動によるベクタリング、ACA(アクティブコーナリングアシスト)も装備されています。
制動(ブレーキ)によるベクタリング
2つめですが、これは制動により、ベクタリングを行うものです。
ACA(アクティブコーナリングアシスト)
これは、トヨタ系に採用されているACA(アクティブコーナリングアシスト)という装備です。
ターンイン時に内輪に制動をかけることで、カーブの外側に車両が膨らむアンダーステアを抑えてくれます。
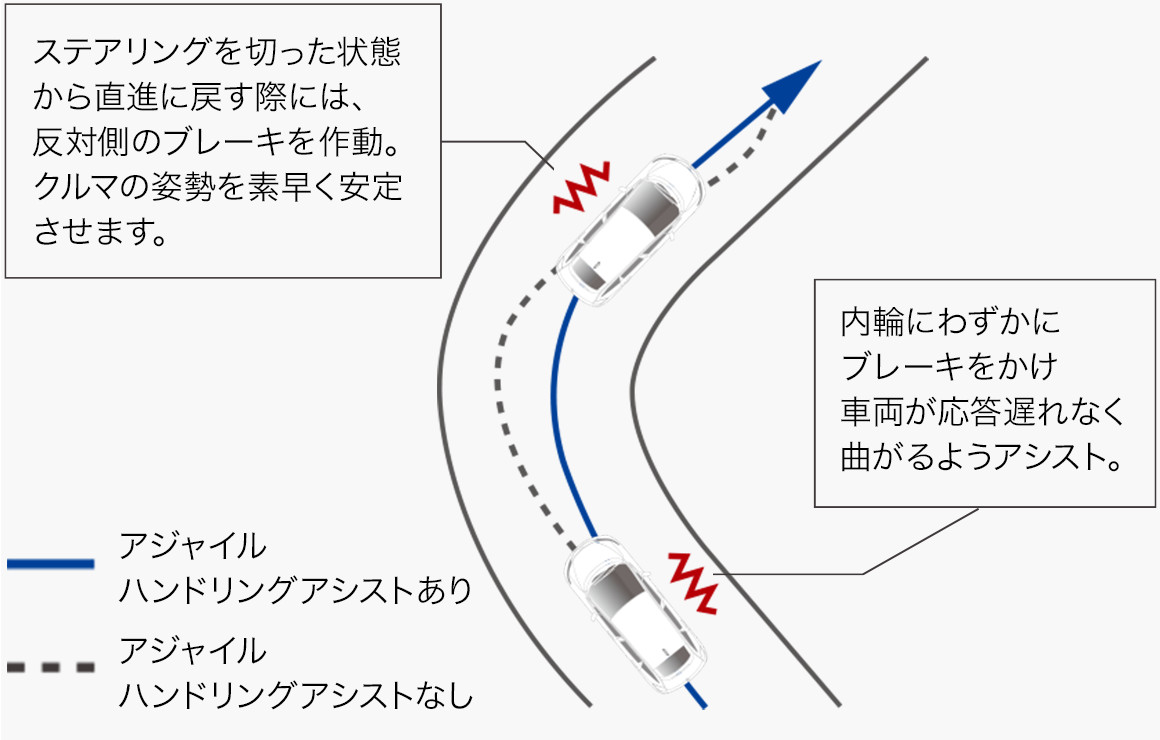
アジャイルハンドリングアシスト(ホンダ)
これもトヨタのACAと同じ様な機構になるのですが、ターンイン時には内輪に制動をかける点は同じなのですが、
ターンアウト時に外輪にブレーキをかける機能も備わります。
ハンドルを切り増した時だけでなく、ハンドルを戻す時にもアシストを行うことでより安定した挙動を実現します。
スタビリティコントロールとの違いは?
今紹介した制動によるベクタリングコントロールは、制動(ブレーキ)をかけることで車両安定を図る装備です。
そこで、同じように制動により、車両安定を図るスタビリティコントロールとのちがいが問題になりますが、基本的には同じ機構になりますが、作動する領域や、車両安定のさせ方が異なります。
スタビリティコントロールは、車両の挙動が乱れることにより生じるわずかなスリップを検知し、制動をかけるものです。緊急回避等を行った時に車両挙動が乱れ、コントロール不能になることを防ぐ目的があります。
つまり、スタビリティコントロールは、車両が滑り始めてから、コントロール不能にならないよう強力に制動します。
対して、ベクタリングコントロールは、車両の挙動が乱れる前に、弱めの制動をかけて、車両挙動の安定を保つための装備です。
ですから、作動のタイミングとしては、ハンドル操作等からコーナーに差し掛かっていることを検知してから、ドライバーの気づかないうちに、ほんの少し制動することで、車両を安定させることが目的なのです。
ベクタリングコントロールは、普通に走っているときから、常に作動するのに対し、スタビリティコントロールは、緊急時、一時的に作動するものといえるでしょう。
トルクによるベクタリング
GVC(G-ベクタリングコントロール)
トヨタ、ホンダ、三菱と同様にコーナリング時の車両挙動を安定させますが、マツダ独自のポイントは、エンジントルクにより挙動の安定を図るところです。
他社であればターンイン時に、ブレーキをかけてコントロールしますが、Gベクタリングコントロールは、エンジントルクを弱めることで、同じ効果を実現します。
そして、ターンアウト時には、トルクを強めて、後輪へ荷重をかけ、安定して走行できるよう支援します。
新たに機能が強化されたGVCプラスでは、ターンアウト時の荷重に加え、ホンダのアジャイルハンドリングアシストと同様にブレーキをかけることでさらなる安定性を実現しました。
これらの一連の効果についてイメージしにくいかもしれませんが、手押し相撲なんかを例にすると、同じ力で押されても、体の荷重が前にあるのと、後ろにあるのとでは、バランスの崩し方は変わってきます、それと同様に、車の挙動も、同じカーブを、同じスピードで走ったとしても、クルマの荷重がどこにあるかによって安定感は変わってくるのでしょう。
具体的には、ドライバーのハンドル操作に応じてエンジンの駆動トルクを制御し、タイヤの接地状態を最適化して、スムーズで効率的な車両挙動を実現する技術です。
直進走行時も車両の挙動をコントロール
そして、このトルク制御は、ピッチング(車両の前後の動き)に対しても効果を見せるのです。
このピッチング制御とは、車両の前後の動きを抑えるものです。高速走行時、ジョイントを超えるときにも多少なりともピッチングは生じます。
この動きにより、ドライバーは無意識のうちに、絶えずハンドル操作で修正を行います。これらの操作が積み重なってドライバーにとって疲労につながります。この動きを抑えることでドライバーの疲労を低減してくれます。
最後に GVCプラスの凄いところ
ここまで、ベクタリングコントロールの各社の違いについて紹介しましたが、マツダのGVCプラスがそれだけすごいかについて説明します。
特別なデバイスを持たない
まず、マツダのGVCプラスの凄いところは、なにもデバイスを持たなくとも実現した点です。
駆動によるベクタリングは、4輪駆動であることや、左右のトルク配分のためにデファレンシャルギア等、後輪のトルク配分のために特別な機構が必要になります。SH-AWDに至っては、ベクタリングを実現するため3個もモーターを搭載しています(もちろんそれだけが目的ではありませんが)。
マツダのGVCプラスは、既存のメカニズムで実現したところが素晴らしいです。
エンジントルクを活用したところ
前後のピッチング制御については、これまでもトヨタのハイブリッド車では、「バネ上制振制御」という機能が備わり、ピッチングを抑えるのに一役を買っていました。ハイブリッド車のみに設定されるのには理由があって、モーターによる制御の方が繊細な制御が可能となるからです。
このピッチングコントロールをエンジントルクで実現するには、かなり細かな制御が必要になりますが、これを成し遂げたというのが、実は大きなことなんですね。
エンジントルクによるコントロール可能なシャシーを作りだせたこと
エンジントルクの制御の大きさとしては実はほんの僅かで、0.01Gほどです。エレベーターの移動によるGが0.05~0.2Gほどとされており、いかに小さいかということがわかります。
例えば、エアコンを稼働させたときに生じるトルク変動よりも小さいことになります。気づかない人も多いかもしれませんがエアコンを稼働させることで自動車のトルクも影響を受けるのですが、それよりもごくわずかなトルク変動ということになります。
そんなごくわずかなトルク変動を伝えることができるシャシーを作りだせたことが、すごい点です。
自動車は様々な走行シーンを想定し、つくりあげられているので、ごくわずかな変化を受け止められるほど作りこんだシャシーということができます。





最近のコメント